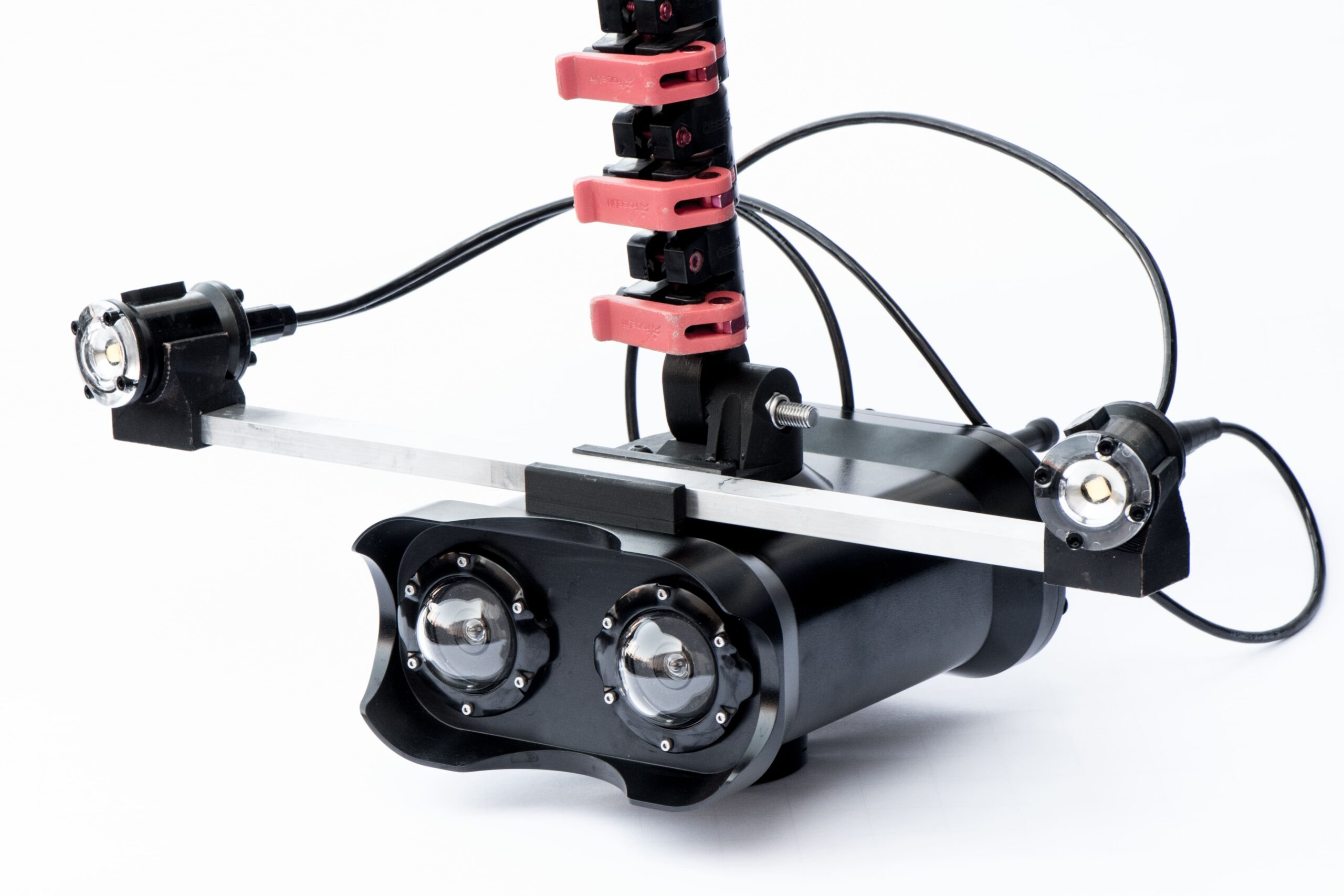
system is a high-precision underwater scanning solution designed for detailed subsea inspection, mapping, and structural assessment. Mounted directly onto a remotely operated vehicle (ROV), the UScanner enables safe, efficient, and accurate underwater surveys without the need for diver intervention.
Engineered for offshore, marine, and inland water applications, the UScanner delivers real-time data acquisition, high-resolution imaging, and comprehensive subsea mapping. It is ideal for inspecting pipelines, ship hulls, quay walls, bridge foundations, dams, subsea cables, and underwater structures.
Stereo global shutter colour camera 2.3MP pixels, HFOV: 90° (<1mm resolution at 1m distance) 50mm Dome ports
Storage
1TB SSD Disk
On board sensors
IMU, depth sensor
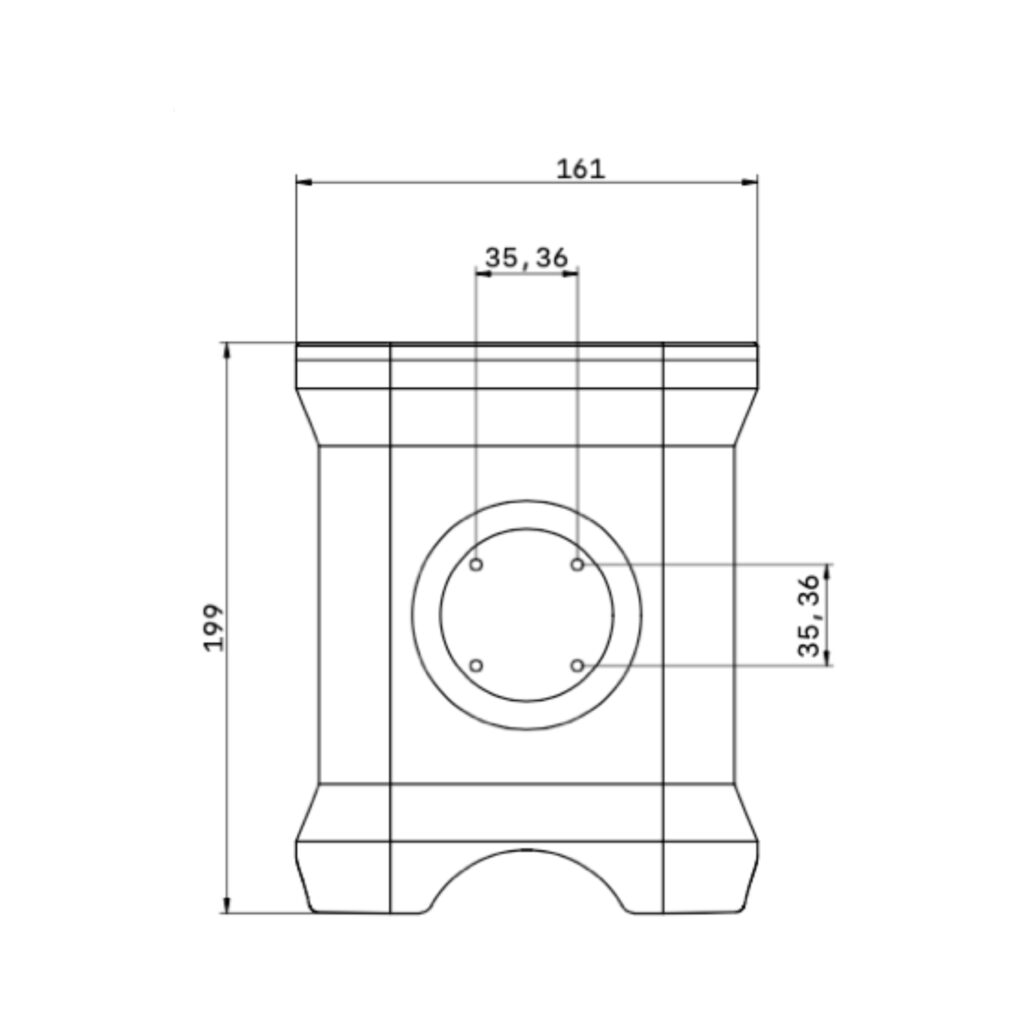
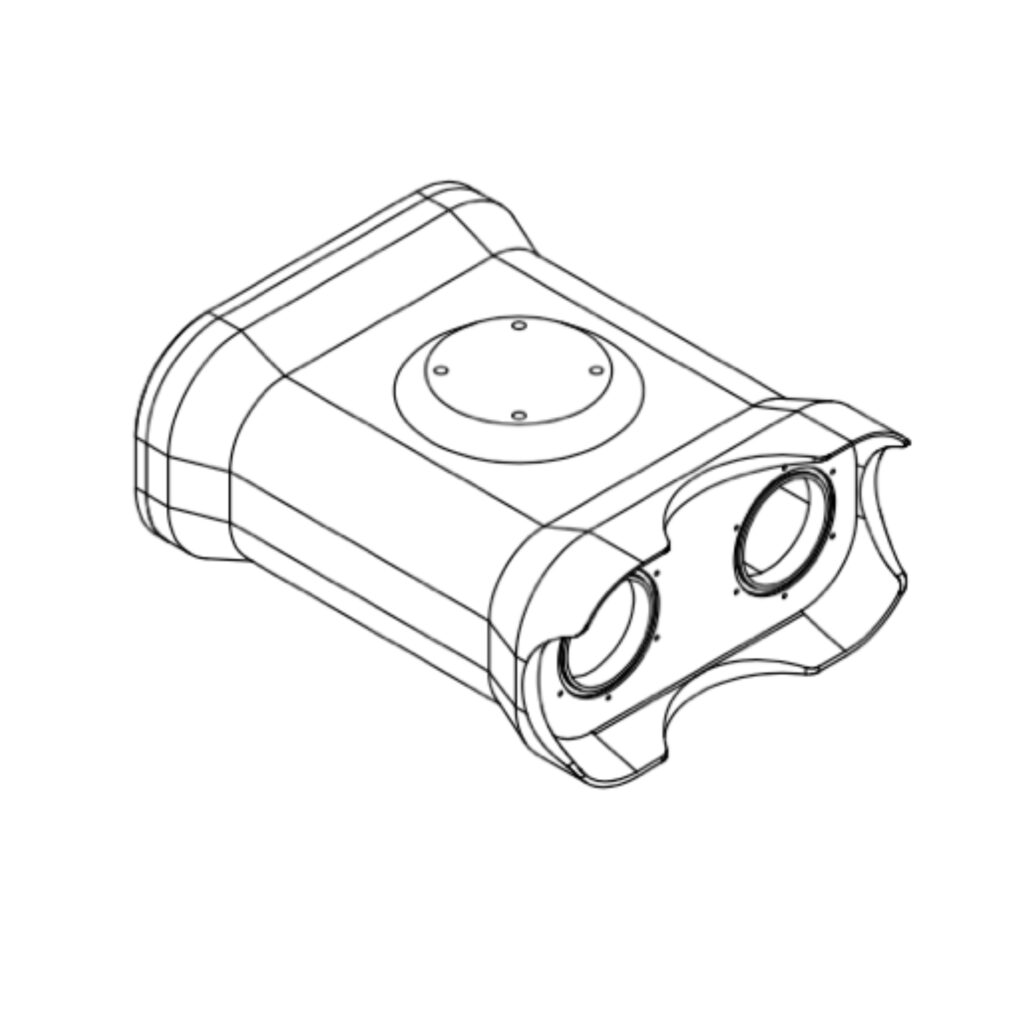
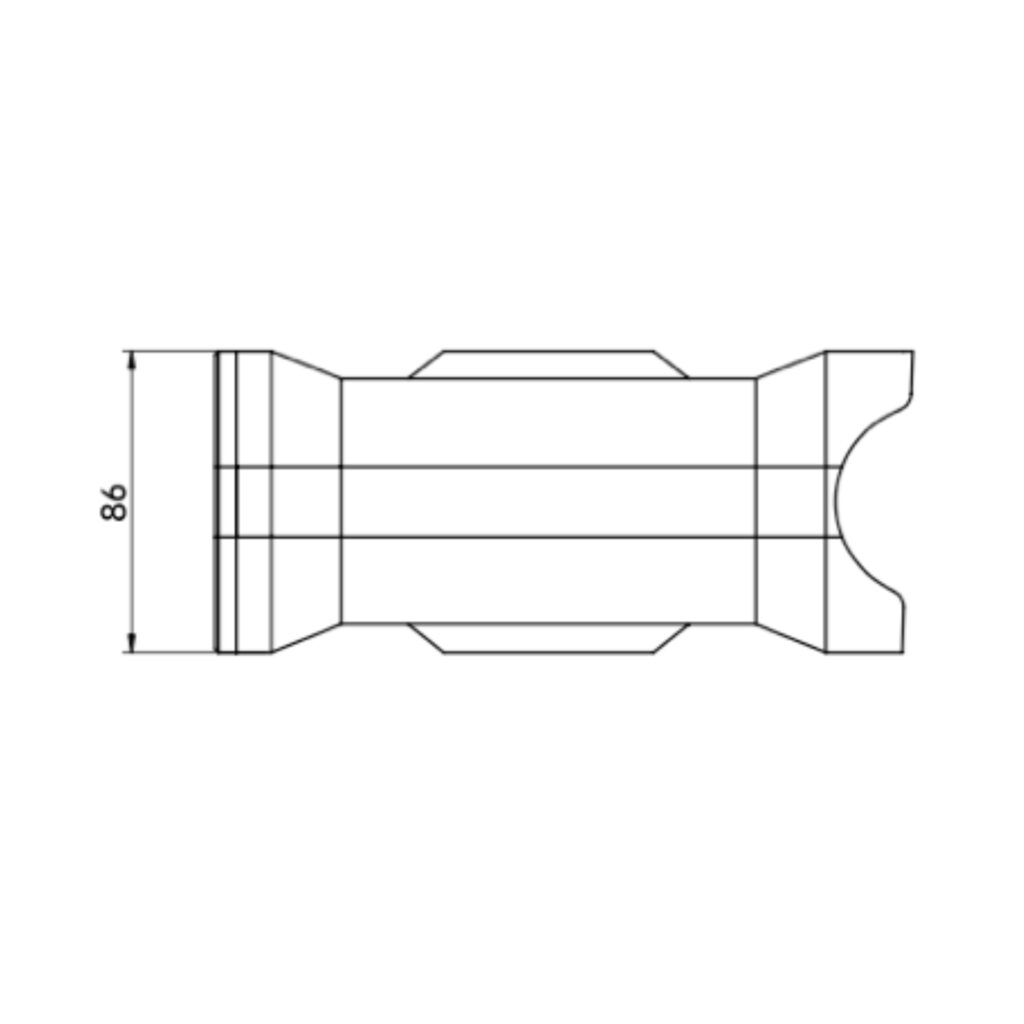
Housing
WxHxD: 161x86x199mm
Weight: 2400/400g
above/below water
Depth rating 200m
Corrosion resistant hard anodised aluminium 6082
Connection
SubConn Micro Circular 8 pole male connector for power and communication SubConn 3 pin for lights
Power consumption
10-48V, <20W
Network bandwidth
The occupied bandwidth between UScanner and UController is < 20Mbps over tether (usually < 10Mbps)
Positioning input
GNSS position can be read into the system – compatible with NMEA format
Management Software
UController software for mangement of the scanner is compatible with Windows, Linux and macOS
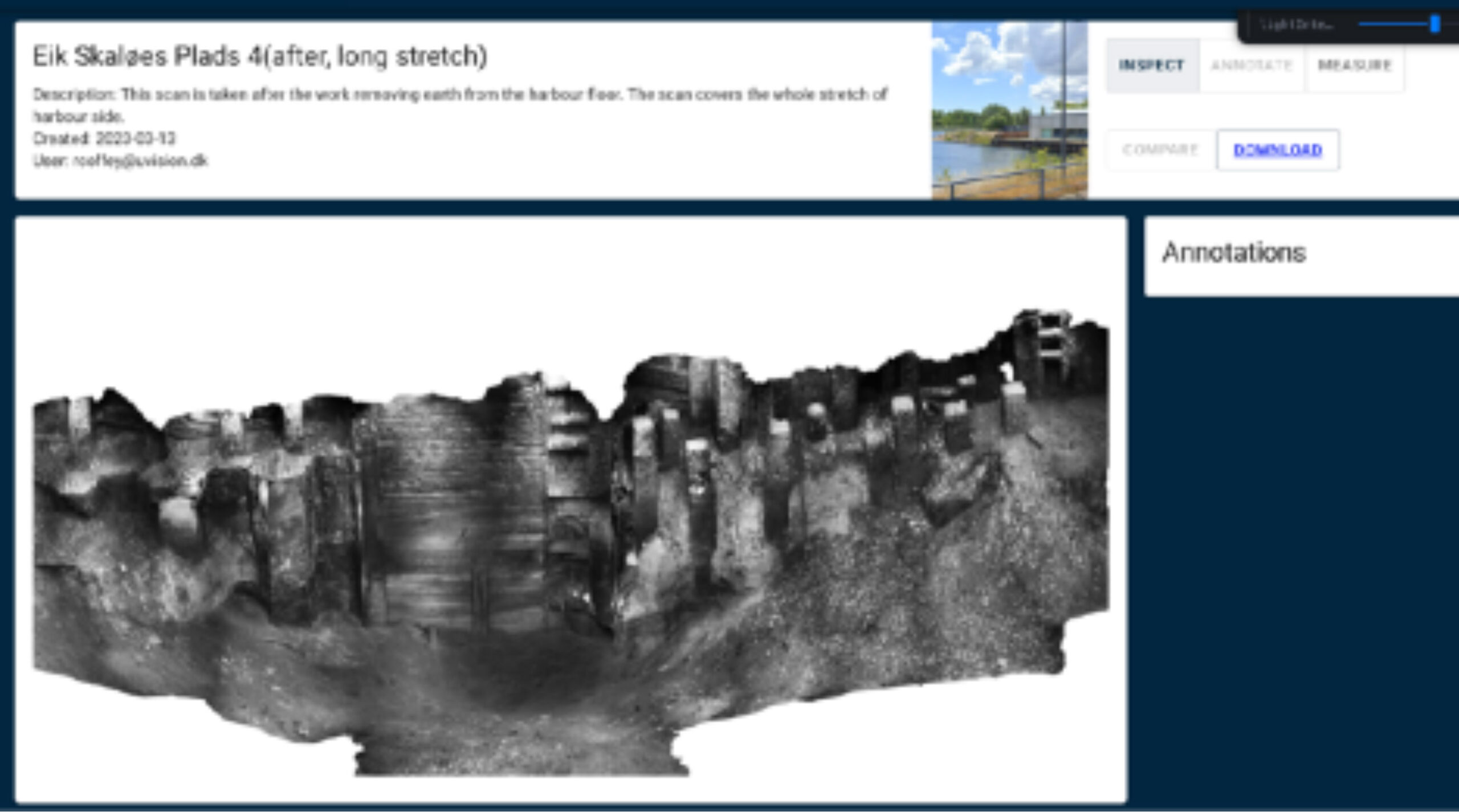
Cloud and Web portal
Post-processing of scan data is performed in the cloud. The 3D model is delivered through our UVisualiser web portal, where it can visualised, measured and annotated.
3D model can be downloaded in various formats (eg .glb, .ply, .obj, .las)
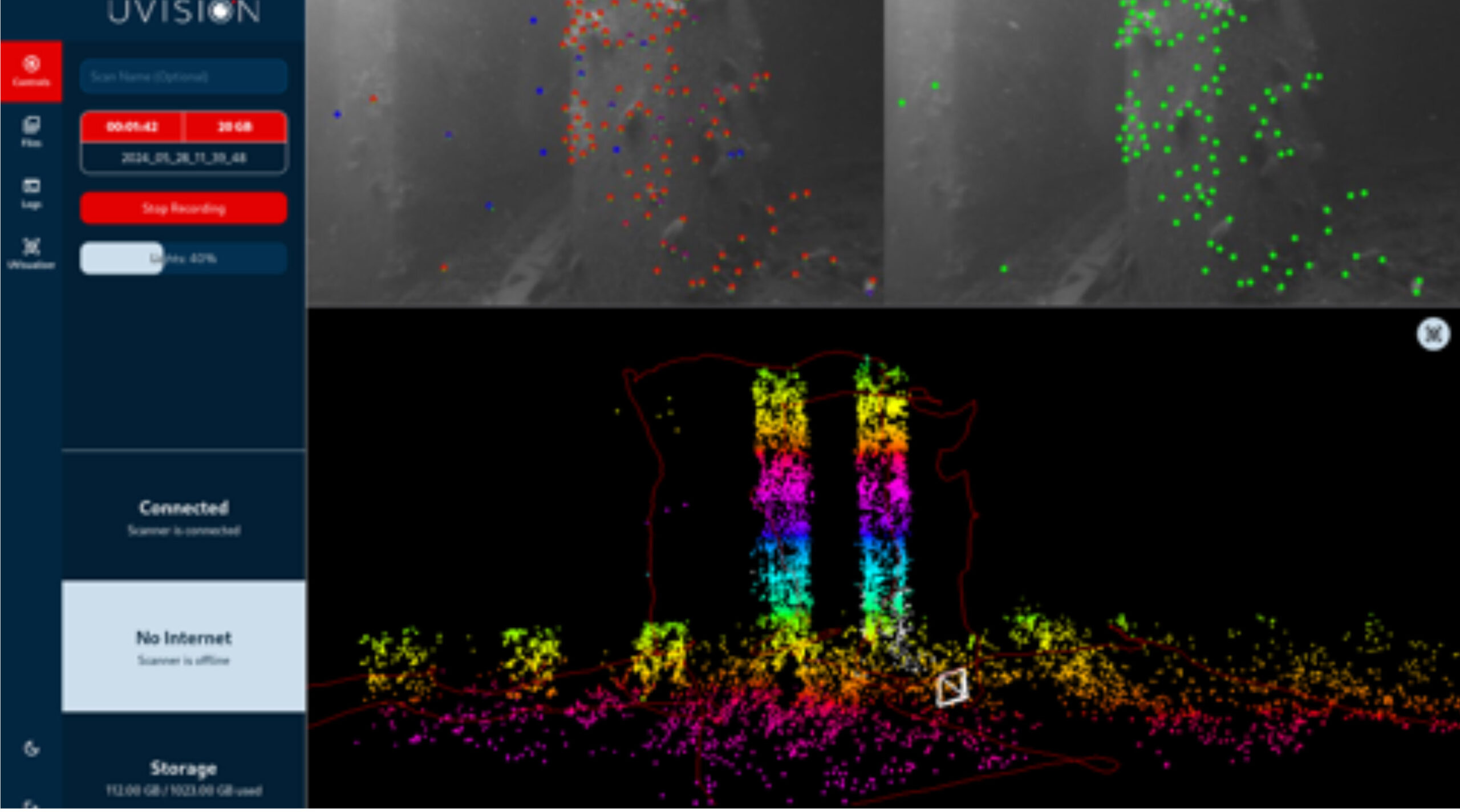
Designed for Superior Operator Experience
The solution is crafted with high focus on the operators user experience. A real-time 3D point cloud helps ensure scan quality, and automated processing of scanned data maximises ease of use.